Quadrocopters are complex mechatronic systems in which hardware, electronics and software interact closely. The goal of this project was to design a
flight capable quadrocopter based on given electronic units.
Analyse
Quadrocotpters generate vertical lift via four rotors. These are arranged either in x or + configuration.
For the project, the more common x-configuration was used, which has a more stable flight behavior than the +-configuration.
By varying the rotational speed of the individual rotors, an inclination of the rotor axes can be achieved and the quadrocopter can be controlled in this way.
By combining the basic movement modes pitch, yaw and roll, the quadrocopter can be steered precisely.
X-Configuration
+-Configuration
Roll
Yaw
Pitch
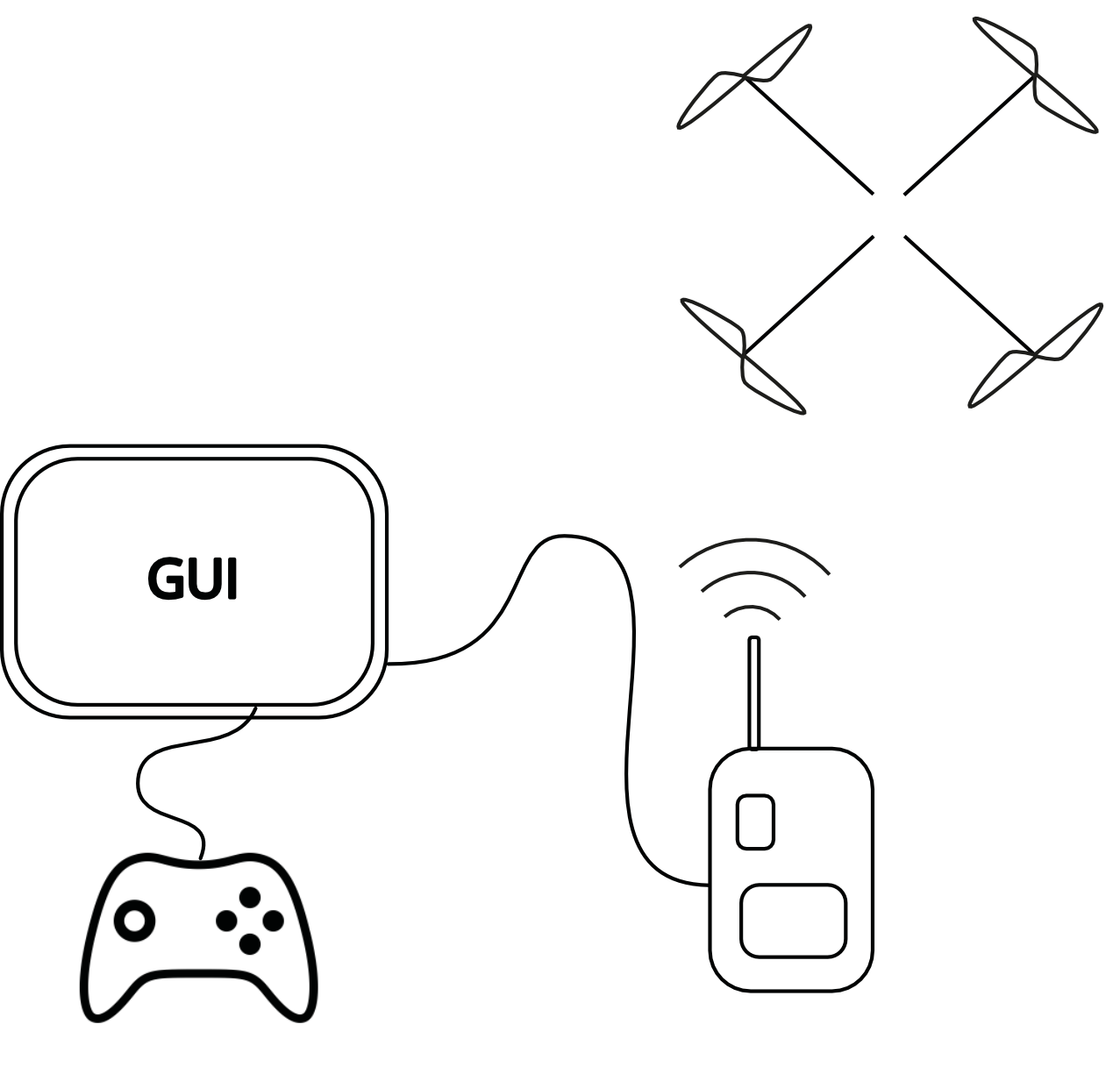
The quadrocopter communicates via radio with a ground station, which receives data from the quadrocopter.
This data is processed in a control unit (e.g. computer or smartphone), compared with incoming commands and sent back to the quadrocopter.
The quadrocopter is controlled via a controller and a user interface on the control unit.
Konzept
The goal of the design process was to create a housing that would protect all critical components even in the event of a crash. A sandwich construction was to ensure that all
components are easily accessible. Aluminum profiles provide a stable connection of the rotors to the main body while allowing easy access to the connections.
Umsetzung
The design was finally converted into a CAD model suitable for production using Solidworks. In the process, the housing shells were first to be manufactured using 3D printing,
in order to check the shape. The aluminum profiles were produced using laser cutters.
Launch
Before the final test flight, all parts were assembled and tested for function. The control system was examined for errors and refined in a VR environment.
Graphical User Interface
The Quadrocpter is controlled by an XBox controller programmed in C#, which processes the received data and displays it in a user interface based on
the design of the Quadrocopter.